本文共 1192 字,大约阅读时间需要 3 分钟。
此项目是我为别人做的大学生创新训练计划项目,从选型到设计都是我自己,先来看一下视频展示
项目使用了一个废弃的擦玻璃机器人,主板全都坏了,好在底盘和底盘上的电机还能用,包括两个24V的减速电机,用来行走,如图:

还有一个24V的涡轮电机,可以产生巨大的吸引力,将底盘吸附在玻璃上,如图:

另外四个角上还各有一个红外对管,用来检测底盘是否可靠放置在玻璃上,未放置状态下对管中间的塑料柱(中间有孔)在原始位置,对管红光通过圆孔输出高电平,放置状态下塑料柱被弹起,对管被塑料柱遮挡输出低电平,如图:

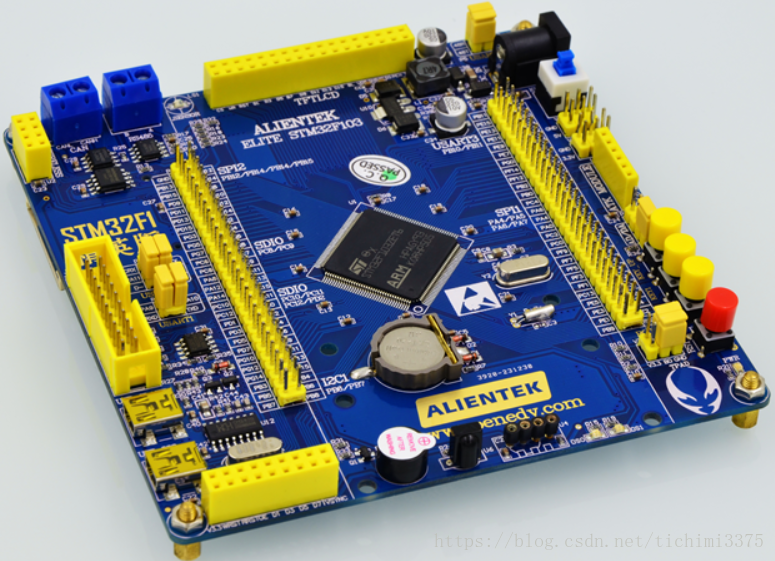
其实项目不麻烦,在接到项目后,第一想法就是让三个电机运作而已,主控选择STM32,手上有块正点原子精英板,所以主控是STM32F103ZET6。
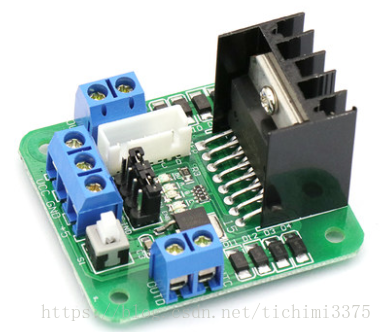
电机电压是24V,所以需要电机驱动,手上只有L298N,所以就用这个就可以,一个用来驱动两侧的减速电机,一个驱动涡轮电机
另外要有遥控,就用简单的红外就行,精英板上有一个红外接收头,其实也可以买那种一套的,如图:

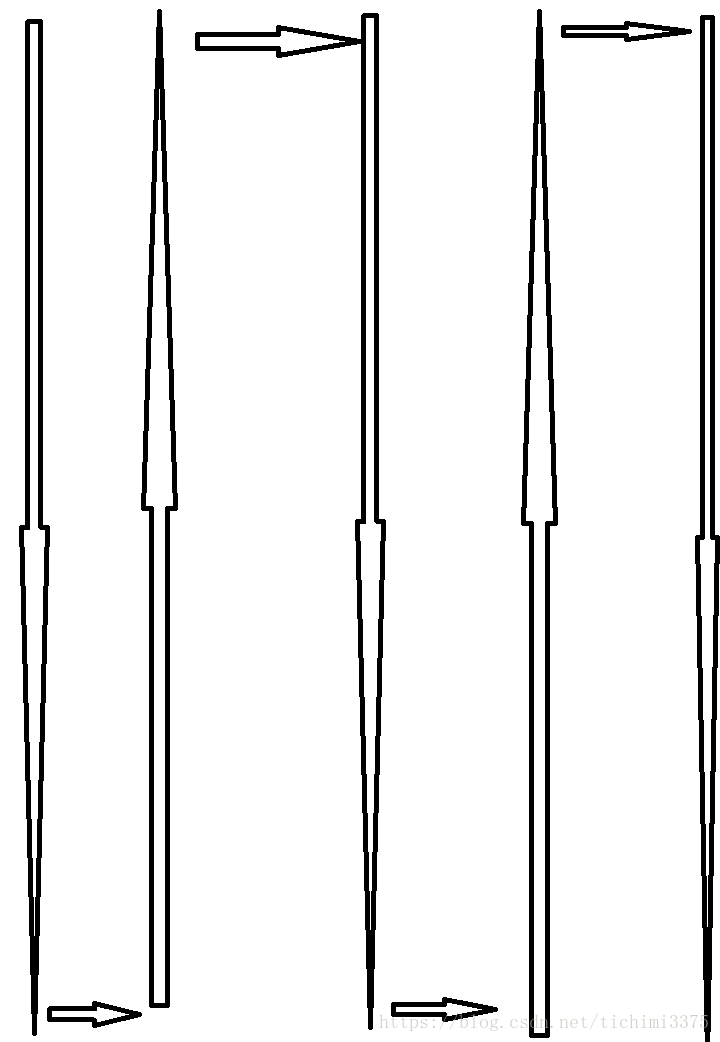
然后需要一个碰撞开关,在底盘接触到玻璃的边沿的时候转换方向,做一个如下图的简单路径:
碰撞开关可以用这样的:

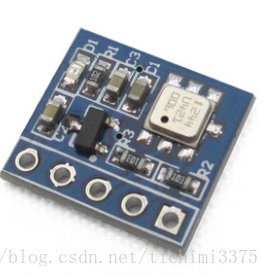
再就是需要一个气压监测,来监测涡轮电机当前造成了多少负压,以此判断底盘与玻璃的吸附程度,放止掉落,可以在刚开始使涡轮电机的功率比较大,等负压达到以后减小功率,来达到快速贴合玻璃的目的,气压监测用BMP180就可以:
然后就是单片机的供电问题,首先想到的就是L298N的降压输出,可以直接有5V输出。朋友,千万千万别这么做,我已开始拿了一块RCT6最小系统试了一下,按理说不会有事,但确实烧了,又拿一块C8T6试了下,还是不行也烧了,所以不能用L298N的那个,单片机要单独供电,然后跟L298N共地就可以了(不共地电机不转的),所以最后采用两节18650电池串联后使用降压稳压模块是输出电压一直稳定在5V(也可以并联后使用升压稳压模块):

这样硬件就完成了
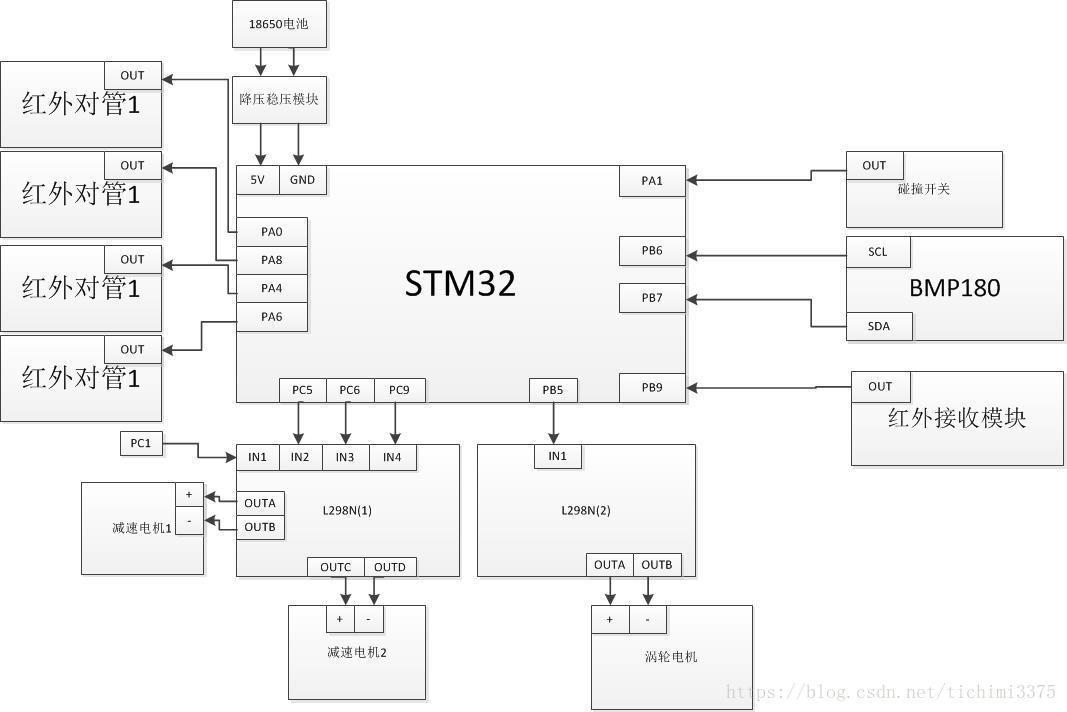
然后是软件(原理图有点不想画,就干脆用Visio代替吧),软件当中没有对两侧的电机调速,也就是全速运行的,只有涡轮电机进行了速度控制

红外遥控的1-8键对应1-8个档位,9键最后加上了一个蠕动电机,用来抽水湿润玻璃,后来实验的时候发现玻璃上沾水后机器很容易掉下来,所以这个功能建议不要加上,0键是全部停止,包括涡轮停止,两侧减速电机也停止。先启动涡轮后有两种运行模式可以选择,一是手动的,又最下方的上下左右键控制,二是自动模式,就会按照上图路径自动行走,碰撞开关激活后回退一定距离然后转向,前进一小段距离再转向然后继续擦。手动模式进入是先按“*”键,再按“OK”键,这样就进入了手动模式;自动模式是先按“#”键,再按“OK”键。
硬件连接图如下:
就是这么简单23333
至此,教程结束,谢谢大家,也欢迎大家关注我的个人技术与资源分享公众号“linkutures”
